TU Delft Researchers Create Soft Robotics that Respond to Color-Based Sensors

 As 3D printing and robotics continue to collide and complement each other, new machines are being created. In soft robotics, we’re seeing the emergence of a class of machines that can deform or morph in response to their environments.
As 3D printing and robotics continue to collide and complement each other, new machines are being created. In soft robotics, we’re seeing the emergence of a class of machines that can deform or morph in response to their environments.
Rob Scharff, a PhD candidate at TU Delft, discusses more how these robots are able to change color via sensors and shape, moving further toward closed-loop control of soft robots, with further research published in ‘Color-based Proprioception of Soft Actuators Interacting with Objects.’ The researchers explain their goal to create soft robots that can interact with items that were previously unknown to them, using color-based sensors.
“Our results demonstrate that deformations of the actuator during interaction, including the sigmoid-like shapes, can be accurately reconstructed. The accurate shape sensing represents a significant step towards closed-loop control of soft robots in unstructured environments,” state the researchers.
Scharff explains soft robotics as the softer, more adaptive robot for today—as well as pointing out that their gripping devices have become much more attuned to handling items like fruits or vegetables, for example, making them useful for industries such as grocery stores or their warehouses—and in exercises where the items they are gripping could be unpredictable in size or fragility.
Why can’t we use traditional sensors in soft robots?
“Traditional robots typically have joints that revolve around a single axis,” says Scharff. “Therefore, a single encoder in each joint is enough to reconstruct the robot’s shape. In contrast, soft robots can bend, stretch and twist at the same time, making existing sensors unsuitable. Therefore, we need sensors that can capture a large variety of deformations. Besides that, the sensors need to be flexible so as not to impede the actuators movement.”
How do your sensors work?
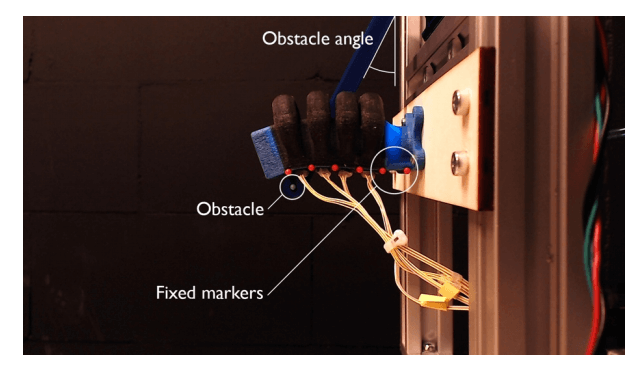
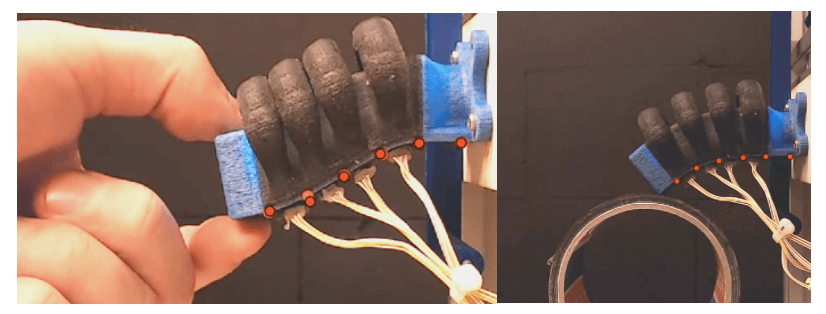
“The bending actuators shown in this research consist of an air chamber with an inextensible layer at the bottom, and an extensible bellow-shape at the top. Inflating the air chamber will cause the bellows at the top to expand, while the bottom remains at the same length, creating a bending motion. We 3D print a color pattern inside these top bellows and observe these color patterns with color sensors at the inextensible bottom of the actuator. When the actuator is inflated, colors that were previously occluded from the sensors start to appear. We use this change in color and the changes in light intensity to predict the shape of the actuator.”

How do you derive the position from this color?
“We calibrate the sensors using a feedforward neural network. To train the network, we collected 1000 samples of sensor values with corresponding actuator shapes. The actuator shapes were represented by 6 markers on the inextensible layer that were tracked by a camera. The inputs of the network are the readings from 4 color sensors with 4 channels (red, green, blue, white) each.”
What is the accuracy of your new method?
“Our method is able to predict the position of each of the markers with an error that is typically between 0.025 and 0.075mm. Our method also performs well on load cases that were not present in the training data. Unlike existing sensors in soft robotics, we can measure the exact shape of how the gripper is bent around an object. Therefore, the work is a big step towards being able to accurately move and grasp objects with soft robots.”
How are the actuators fabricated?
“The actuators are fabricated as a single piece using PolyJet multi-material Additive Manufacturing. The bellows are fabricated using the flexible Agilus Black material, whereas the colored structure is composed of alternating segments of VeroCyan and VeroMagenta. The custom sensor PCB’s are embedded on small 3-D printed plugs that are plugged into the bottom of the actuator to create an airtight fit. Color sensors are very cheap and accessible which makes it easy to implement the technique in other soft robots as well.”
3D printing in multiple materials, as well as multiple colors, is becoming more common as technology and hardware catch up with concepts and user demands, along with the accompaniment of sensors, electronics, wearables, and much more. What do you think of this news? Let us know your thoughts; join the discussion of this and other 3D printing topics at 3DPrintBoard.com.
[Source / Images: TU Delft]Subscribe to Our Email Newsletter
Stay up-to-date on all the latest news from the 3D printing industry and receive information and offers from third party vendors.
Print Services
Upload your 3D Models and get them printed quickly and efficiently.









You May Also Like
Formnext 2026: A More Mature AM Landscape Takes Shape in Frankfurt
Formnext 2025 offered a clear view of where Additive Manufacturing currently stands: an industry that has moved well beyond its hype phase and is progressing at different speeds across technologies,...
Engineering Readiness for the Most Demanding Defense Programs
As additive manufacturing moves from innovation to execution, success is no longer defined by machine capability alone. For the most demanding U.S. defense programs, additive manufacturing must be engineered, qualified,...
From Monitoring to Measurement: Why Objective Inspection is Becoming Essential for Scalable Metal AM
Additive Manufacturing (AM) is no longer judged by its printing capabilities, but how it can print reliably, repeatedly, at scale. As metal AM continues its transition from prototyping to production,...
Cheap Printers Make Metal Powders Costly
Last year, on stage at AM Strategies, the argument was simple: additive manufacturing had to stop chasing elegance and start chasing economics. The 3D printing community had spent decades refining...